Skills: Laser cutting, 3D Printing, OnShape

For my Mechanical Prototyping course, I was challenged to design an automata that translates the motion of a hand crank to convey a story and integrates cams, followers, linkages, and gears. For this project, we were permitted to use eucaboard, 3D printing, and various hardware to prototype and build the mechanisms.

Inspired by my cat chasing bugs outside, I designed a story where a cat swats at butterflies and a dragonfly as they flutter just out of reach. For this project, I focused on improving my rapid prototyping and animated CAD skills. I initially designed the main components in CAD and then created low-fidelity prototypes using dowels and cardboard. This process allowed me to understand the interaction of the mechanisms and adjust details, such as the point and angle at which the dowel contacts the cat’s arm and the size and shape of the cam followers. Overall, this process leads to a more efficient and reliable design.
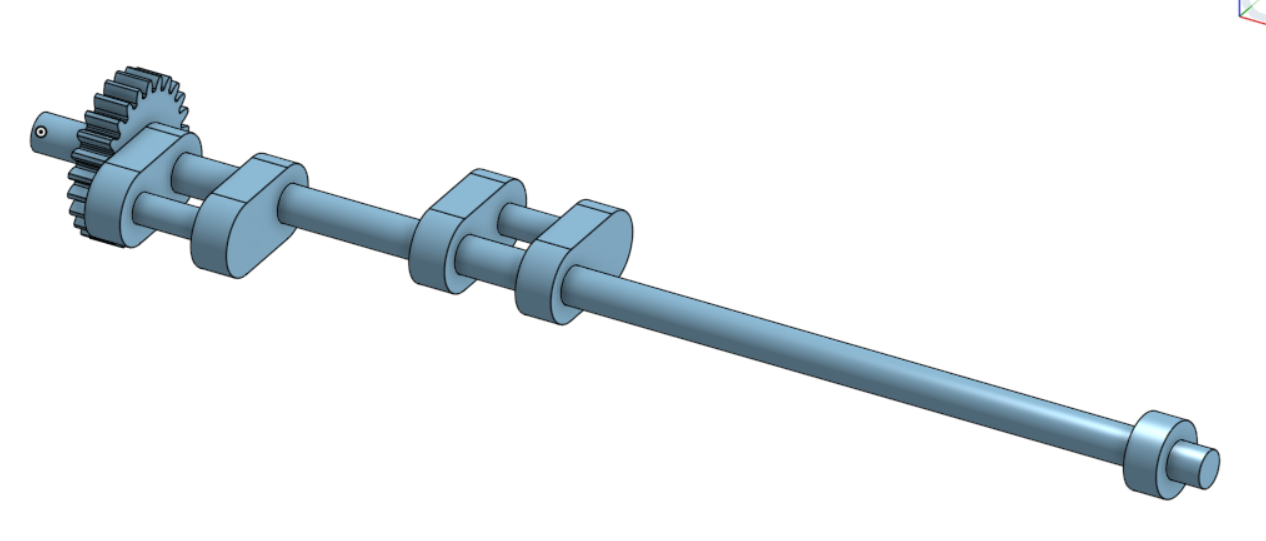
CAD of mechanisms
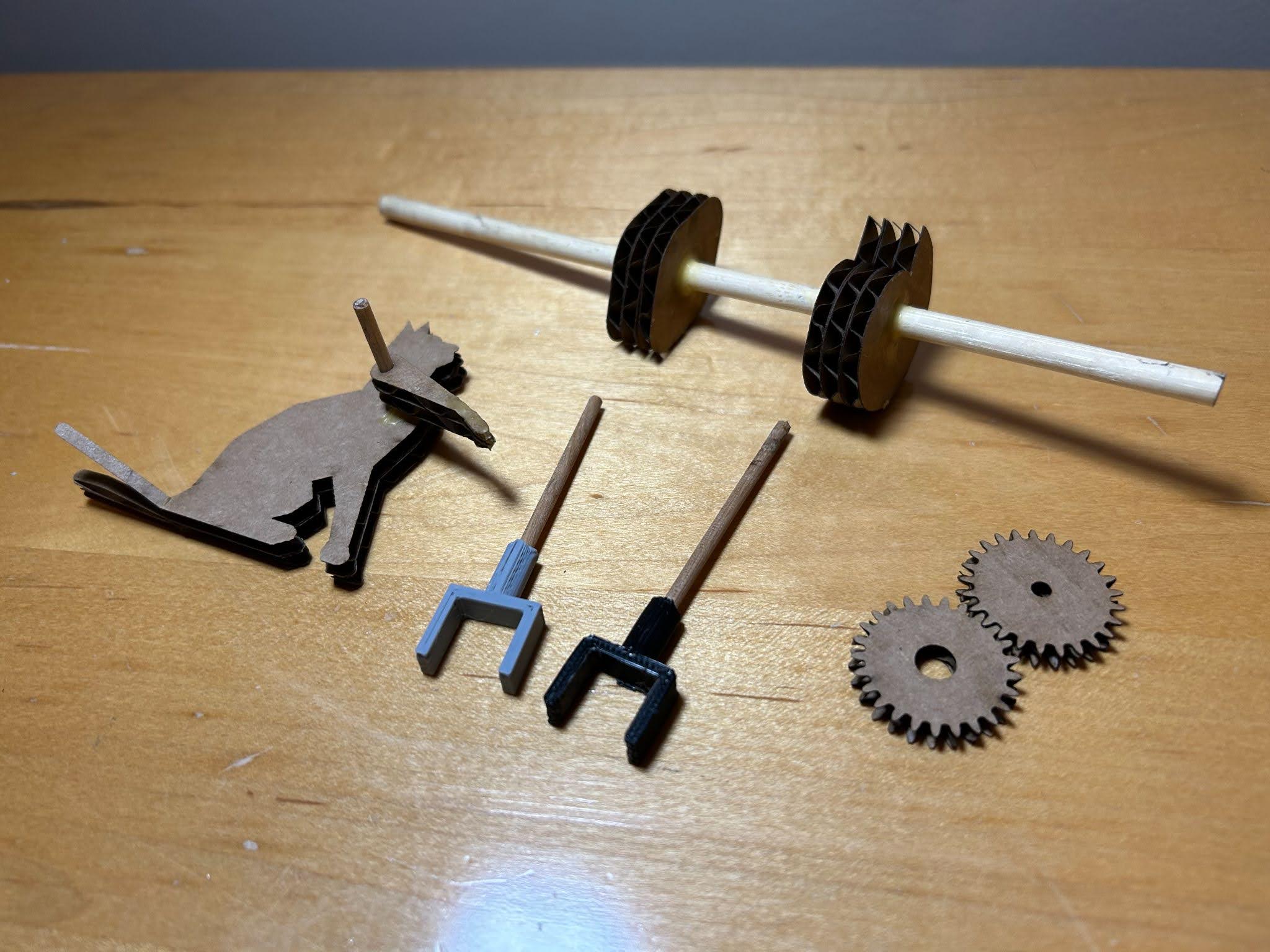
Sketch model compoents
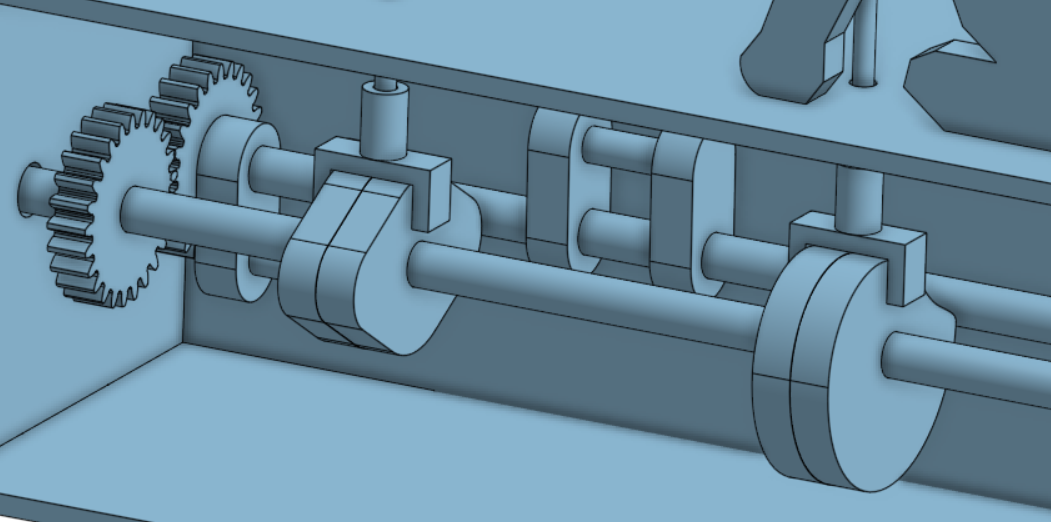
The mechanism for this project features two main arms. The front arm, which is connected directly to the hand crank, includes both a drop cam and an elliptical cam that are made from sanded, laser-cut wood and wrapped with low friction nylon tape. The drop cam produces a slow upward lift followed by a quick drop, creating a natural swatting motion of the cat’s arm. The elliptical cam drives the largest butterfly, producing a quick, smooth up and down motion that creates a fluttering effect. The cam followers were made using 3D-printed attachments on wooden dowels to ensure smooth and consistent contact with the cams.
CAD of cam arm

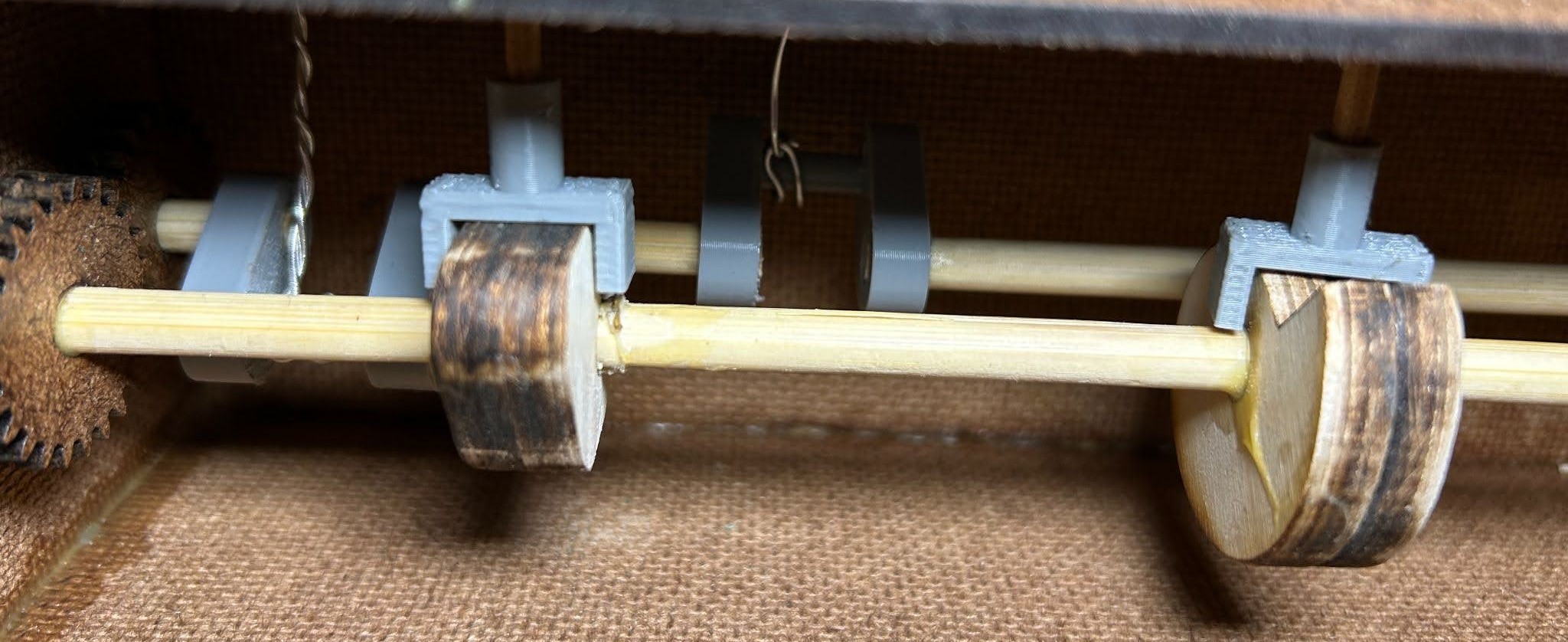
Drop cam and follower
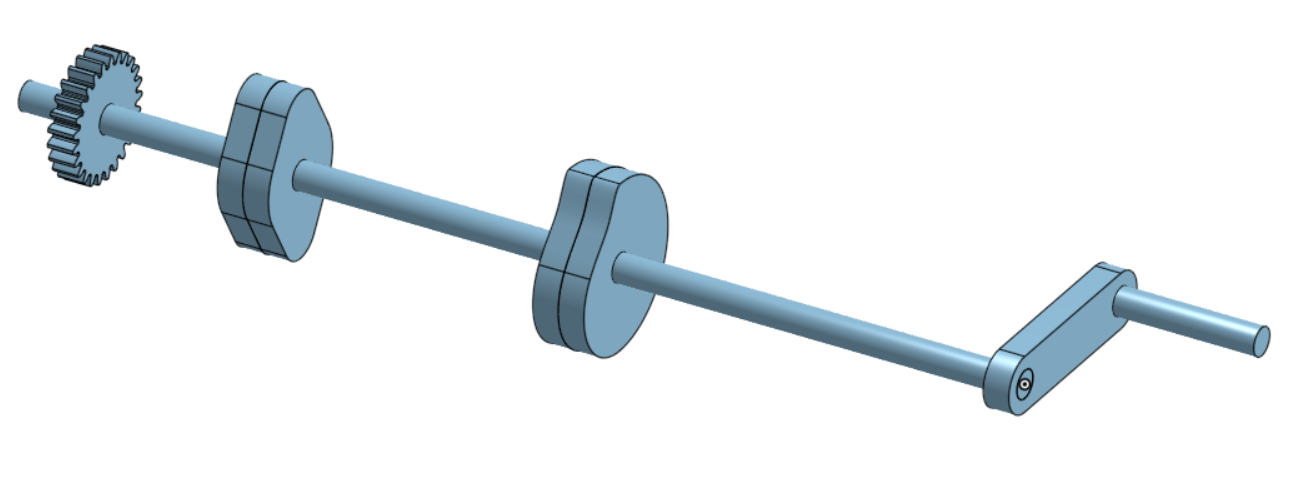
The second arm is driven by a gear that is attached to the first arm. This arm uses two custom 3D-printed linkage attachments that offset the dowel from its axis. Attached to these linkages is a wire connected to the second butterfly and the dragonfly. This configuration allows the insects to move both vertically and horizontally, resulting in a more sporadic flight pattern.
CAD of linkage arm
Final mechanism assembly
This project significantly improved my understanding of mechanical mechanisms. I developed skills in the integration of mechanisms, the interaction of mechanisms in a 3D CAD model, and animating a model to achieve the proper movement. I gained a deeper understanding of gear ratios and their effect on motion and speed, as well as how to design linkages to achieve specific movement paths.
Through trial and error, I learned the importance of precise measurement and alignment of mechanisms - small errors in the elliptical cam alignment resulted in increased friction and jamming of the followers. I also deepened my knowledge of the mathematics behind cam profiles, including how a cam’s geometry affects the accelerations and deceleration of the driven element.